|
|
||||
|
|
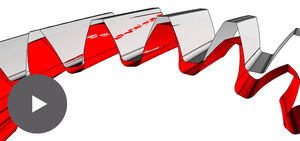
Les gĂŠomĂŠtries des deux roues dâun engrenage peuvent provenir dâoutils les plus divers. En fin de compte, on se pose toujours la question suivante : ÂŤ ces roues vont-elles vraiment ensemble ? Âť Dans le cas de dentures cylindriques sans dĂŠport du profil, la vĂŠrification Ă lâaide des paramètres demeure relativement simple. Sâil sâagit de roues droites Ă denture hĂŠlicoĂŻdale, une reprĂŠsentation 2D peut apporter une aide prĂŠcieuse. Avec les engrenages hĂŠlicoĂŻdaux au plus tard, ce sont souvent seulement les roues finies qui montrent si le calcul ĂŠtait correct. En cas dâerreur, cela peut sâavĂŠrer onĂŠreux. Une visualisation est amplement prĂŠfĂŠrable car elle ĂŠvite les rebuts. Ă cet effet, nous avons dĂŠveloppĂŠ notre logiciel GearViewer. Il permet de visualiser les roues en rotation dans leur position de montage â avec aussi les erreurs de rĂŠglage de lâaxe.  Les deux roues sont en contact selon une ligne. En mouvement, cette ligne de contact suit la dent. Elle fournit des informations sur lâexactitude des gĂŠomĂŠtries de la roue, car en effet, le moindre ĂŠcart par rapport Ă la thĂŠorie entraĂŽne la disparition, la dĂŠformation ou une pĂŠnĂŠtration de la ligne de contact. En revanche, si les gĂŠomĂŠtries de la roue sont correctes, la ligne de contact suit parfaitement le profil de la dent.  Les roues se touchent en un point de contact. En mouvement, ce point suit la dent de façonoblique. Comme pour les rouescylindriques, cela permet dâobtenir des informations sur lâexactitude des gĂŠomĂŠtries de la roue.  Une vis sans fin (non globique) et une roue cylindrique se touchent en un point de contact, comme pour les engrenages gauches hĂŠlicoĂŻdaux. Toute inexactitude quant aux lignes ou points de contact sauterait immĂŠdiatement aux yeux. Ainsi, il est encore possible dâapporter des corrections avant de produire les outils et les pièces. GearViewer a uniquement besoin des deux profils de contour en section apparente et de quelques autres paramètres tels que le pas hĂŠlicoĂŻdal. La reprĂŠsentation finie sâaffiche en quelque secondes. Cette opĂŠration sâintègre très bien Ă un processus de conception itĂŠratif au cours duquel les paramètres sont changĂŠs Ă tour de rĂ´le afin de contrĂ´ler leurs effets. GearViewer est disponible non seulement pour les engrenages mais ĂŠgalement pour les domaines dâapplication suivants : 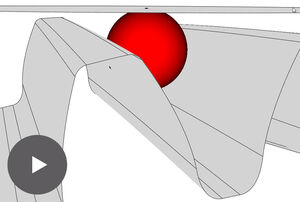 La cote sur billes peut ĂŞtre vĂŠrifiĂŠe visuellement par GearViewer. Les points de contact entre la roue, les billes et les disques de la vis micromĂŠtrique montrent immĂŠdiatement si tout s'assemble vraiment. La dimension peut ĂŞtre saisie par l'utilisateur ou, en option, dĂŠterminĂŠe par GearViewer. Cela fonctionne pour les engrenages Ă dĂŠveloppante normale, mais aussi pour les engrenages Ă dĂŠveloppante bombĂŠe, les roues de montres, les engrenages Novikov, etc. 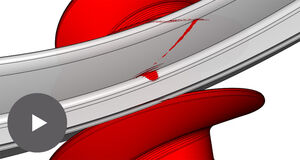 Une vis sans fin produite par un outil de forme (p. ex. une fraise de forme) crĂŠe une ligne de contact complexe qui peut ĂŞtre rapidement perturbĂŠe en cas dâerreur de rĂŠglage de la machine, entraĂŽnant ainsi une gĂŠomĂŠtrie incorrecte de la vis sans fin. GearViewer permet de simuler diffĂŠrentes erreurs de rĂŠglage de la machine. |
|||
Social Media |
||||
|
© 2000-2026 Irnich Informatik GmbH, CH-2560 Nidau, Impressum, 2012 designed and created by LeiserPublishing GmbH |
||||